"Small robots are at present deprived of the autonomous navigation capabilities necessary for real-world applications. Resource-restricted robots, such as lightweight flying drones7,8, can simply not carry or power the required computational systems for high-precision, map-based autonomous navigation2,3. Despite efforts towards improved computational efficiency, navigation based on detailed metric maps still requires a high-end laptop9 or a GPU-enabled embedded computer10."
"Efficiency can be improved by sacrificing map accuracy, storing it as a topological graph with nodes as places and edges as paths11,12. However, the robot still needs to recognize where it is and adjust the map accordingly, leading to increased computational requirements for larger trajectories11,13. This limits the navigation range of the most efficient map-based robot navigation methods."
"The state of the art is a tiny flying robot that uses 500 kB of memory on a low-power AI chip for navigating in a 4 × 5-m area14. Nature shows that extremely resource-efficient, long-range navigation is possible. Small insects such as honeybees robustly navigate up to several kilometres from their hive1."
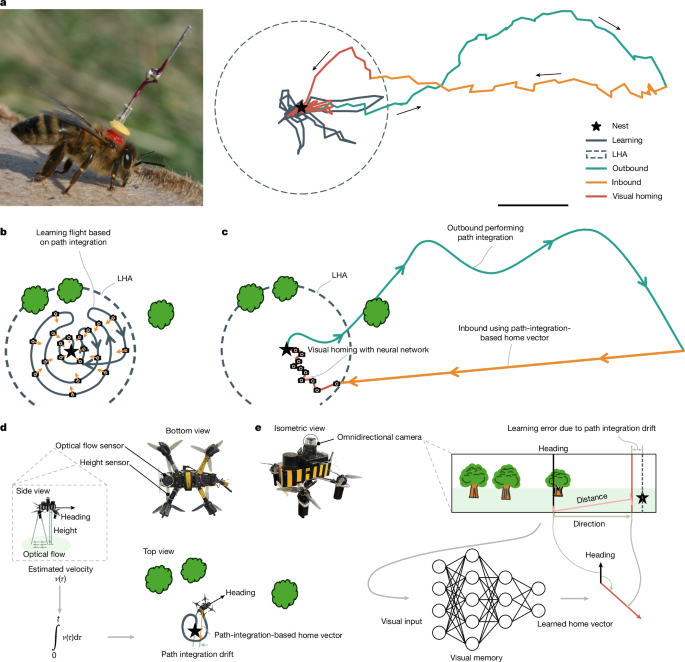
"Their impressive navigation capabilities rely on two components15. The first is path integration16, which allows insects to estimate their position with respect to a starting point by integrating the directions and distances travelled. Because path integration is subject to increasing drift, insects also rely on a second component called view memory, which is the act of recalling visual landmarks and their relation to places of interest17."
Small robots cannot currently perform autonomous navigation needed for real-world use because they lack the computation and power required for high-precision, map-based methods. Lightweight flying drones cannot carry or run the systems needed for detailed metric maps, which often require a laptop or GPU-enabled embedded computer. Efficiency can be improved by using topological representations that store places as nodes and paths as edges, but the robot must still localize itself and update the representation as trajectories grow, increasing computational demands and limiting range. Honeybees demonstrate long-range navigation by combining path integration with view memory. Path integration estimates position relative to a start point by integrating traveled directions and distances, while view memory recalls visual landmarks and their relation to places of interest to correct drift.
#robot-navigation #resource-constrained-robotics #topological-mapping #insect-inspired-navigation #path-integration
Read at Nature
Unable to calculate read time
Collection
[
|
...
]